主要特性:
-----------------------------------------------------------------------
輸出連續扭矩為10~450N.m
適用有效負載小于20公斤以下的協作機器人
額定轉速最高可達40RPM,加速度可達10RPS/S
關節輸出端重復定位精度高達0.001度
EtherCAT,CANopen通信可選,支持大部分主流機器人控制器
常規為48VDC供電,24~60VDC之間供電可選
結構極其緊湊,最小關節僅為90x128mm,重量<2Kg
安裝拆卸簡單、快捷
也為客戶提供OEM定制化服務
機械傳動與電機參數規格:
-----------------------------------------------------------------------
參數
單位
RJS14
RJS17
RJS20
RJS25
RJS32
RJS40
減速器速比
--
101
101
101
101
100
160
減速器背隙
arcmin
10
10
10
10
10
10
轉動精度
arcmin
1
1
1
1
1
1
電機極對數
--
6
6
7
6
7
6
電機額定功率
W
117
146
210
350
419
1000
電機額定電壓
V
48
48
48
48
48
48
電機額定電流
A
5.7
5.7
7
12
13.3
20
電機額定轉速
rpm
3000
3000
3000
2000
2000
2000
電機額定轉矩
Nm
0.42
0.5
0.7
1.69
2.0
5
電機轉矩常數
Nm/A
0.069
0.124
0.1
0.14
0.163
0.25
反電動勢系數
V/krpm
8.3
10
6.26
12
9.85
15.5
關節重量
kg
1.75
2.37
2.92
4.7
7.5
16
關節直徑
mm
90
90
100
119
156
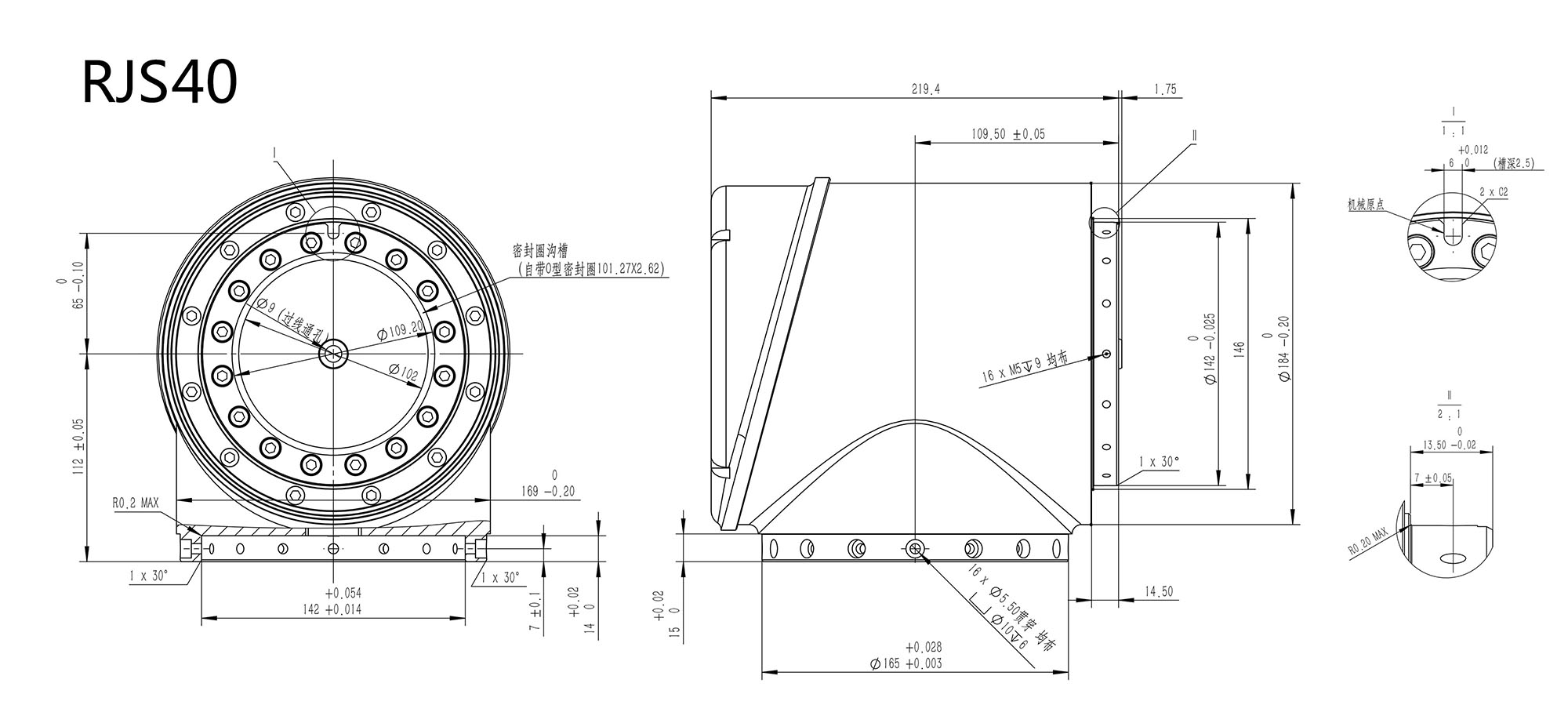
184
關節高度
mm
104
104
114
135
172
207
關節長度
mm
130
144
144
160
175
221.1
許用負載轉矩
Nm
28
54
82
157
333
279
平均負載轉矩
Nm
11
39
49
108
216
450
最大瞬時轉矩
Nm
54
86
147
284
647
1000
額定轉速
rpm
30
30
30
20
20
12.5
最大轉速
rpm
40
35
35
25
25
15
增量編碼器
P/R
20000
20000
20000
20000
20000
20000
絕對值編碼器
Bit
17/19
17/19
17/19
17/19
17/19
17/19
安裝尺寸外形圖:
-----------------------------------------------------------------------





注:聯系我時,請說是在“傲立機床網”上看到的,謝謝!